Vision Based Navigation of Arduino Robot
Freshmen Course Project
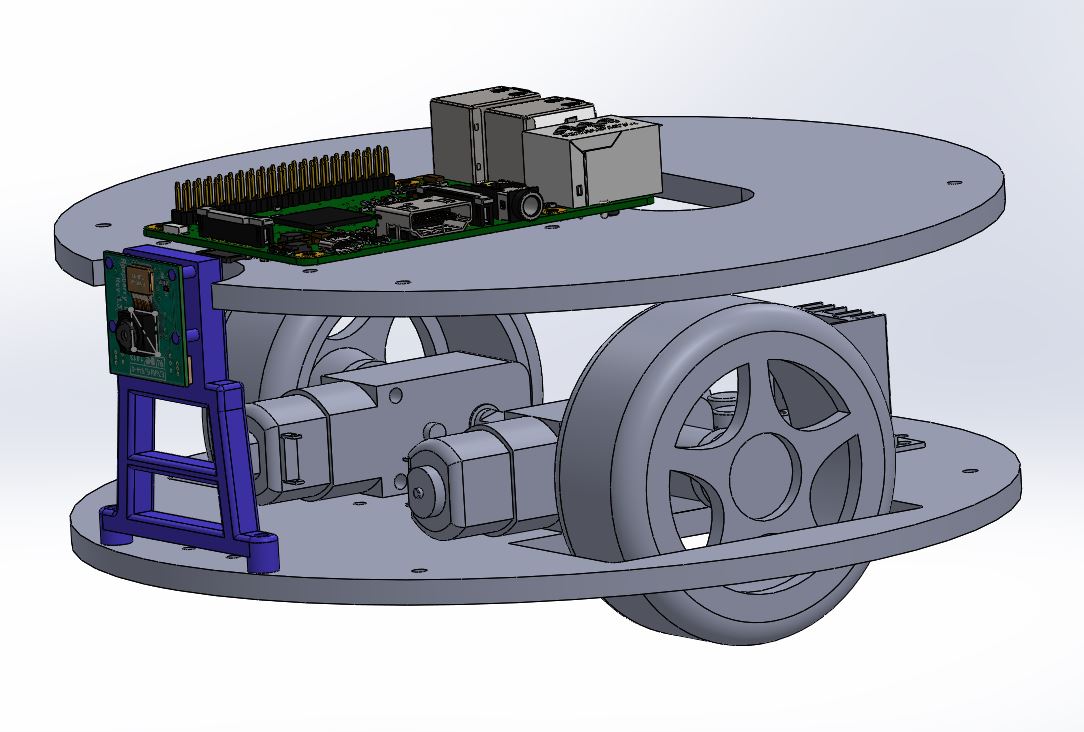
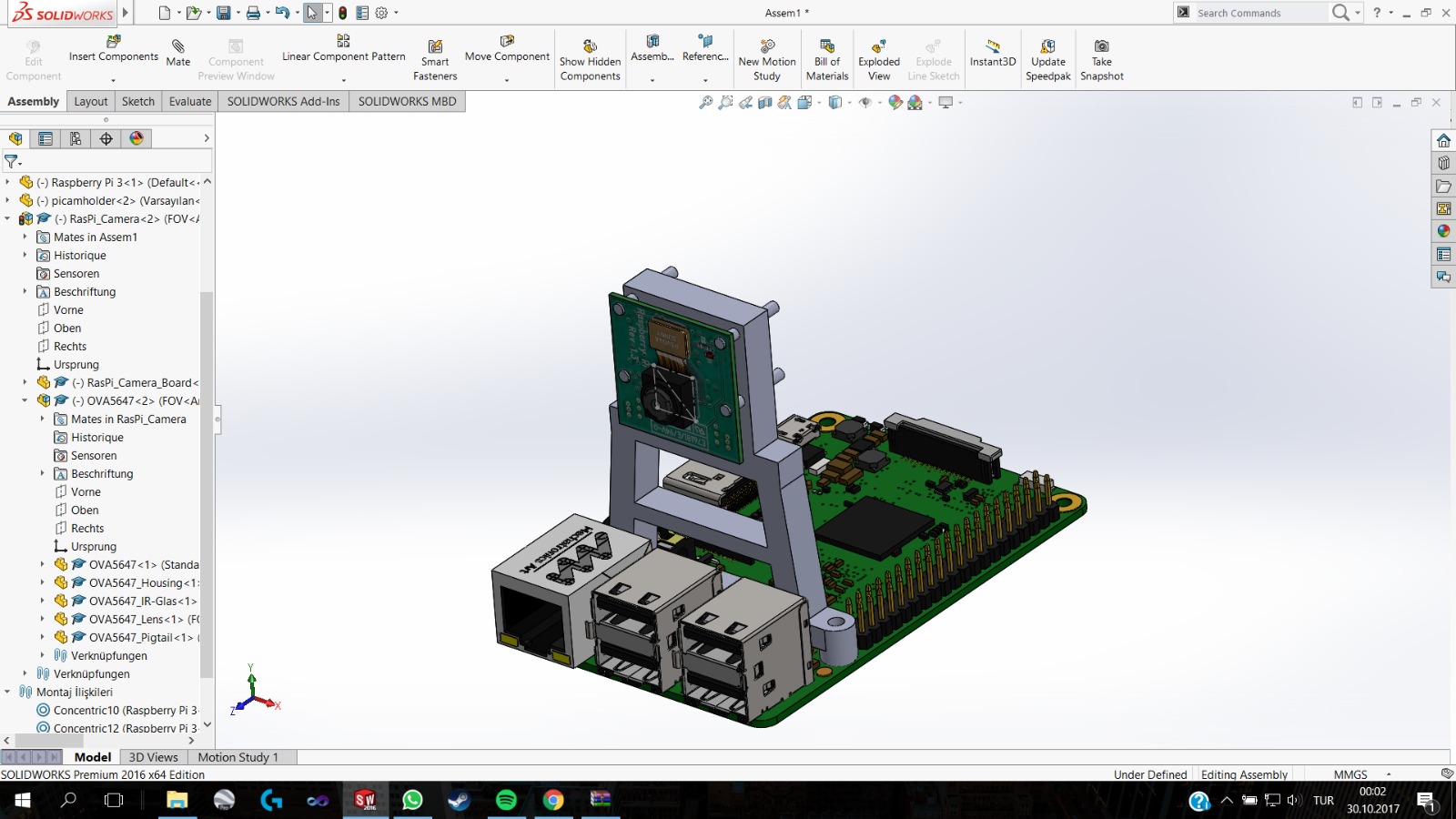
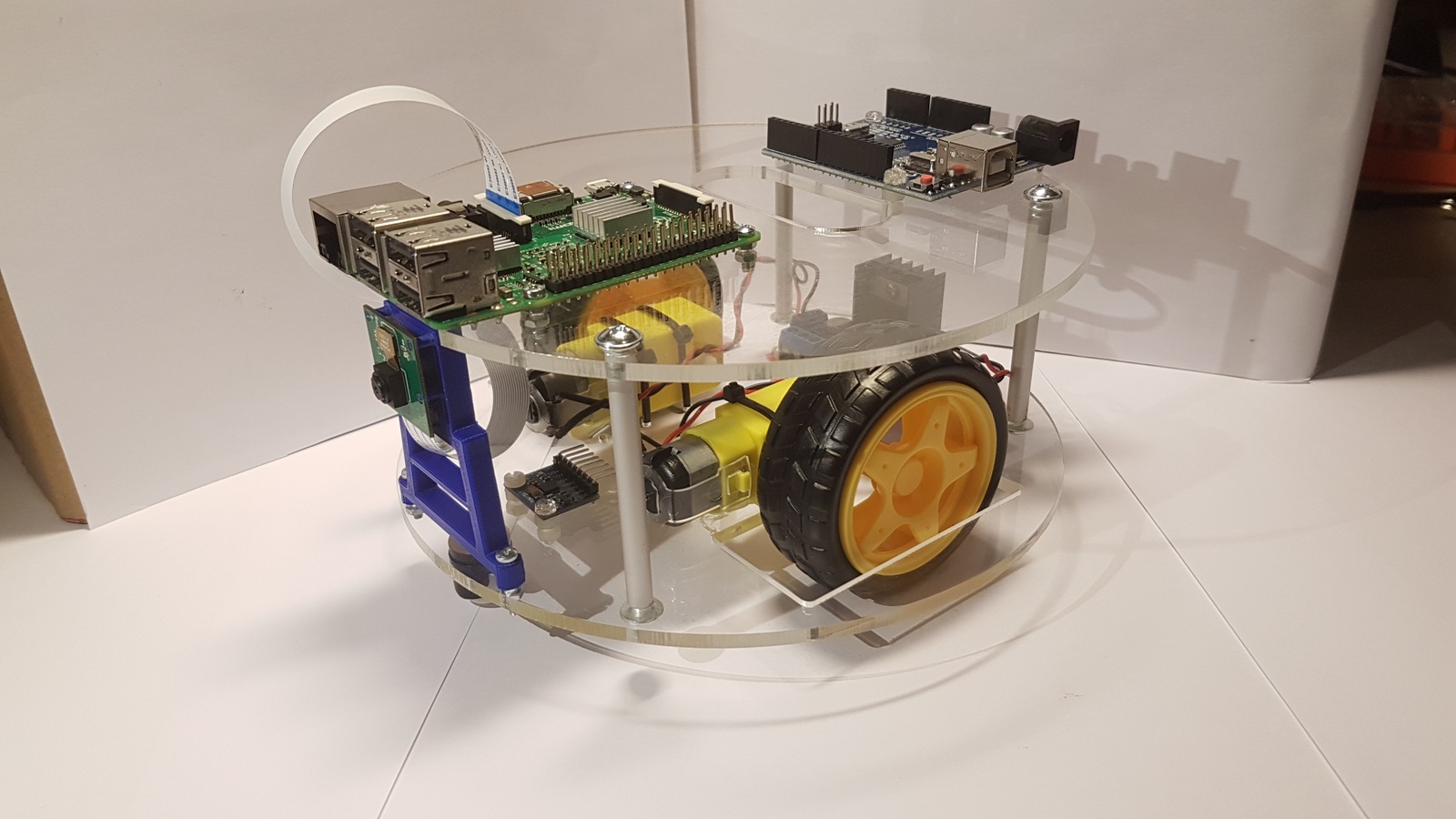
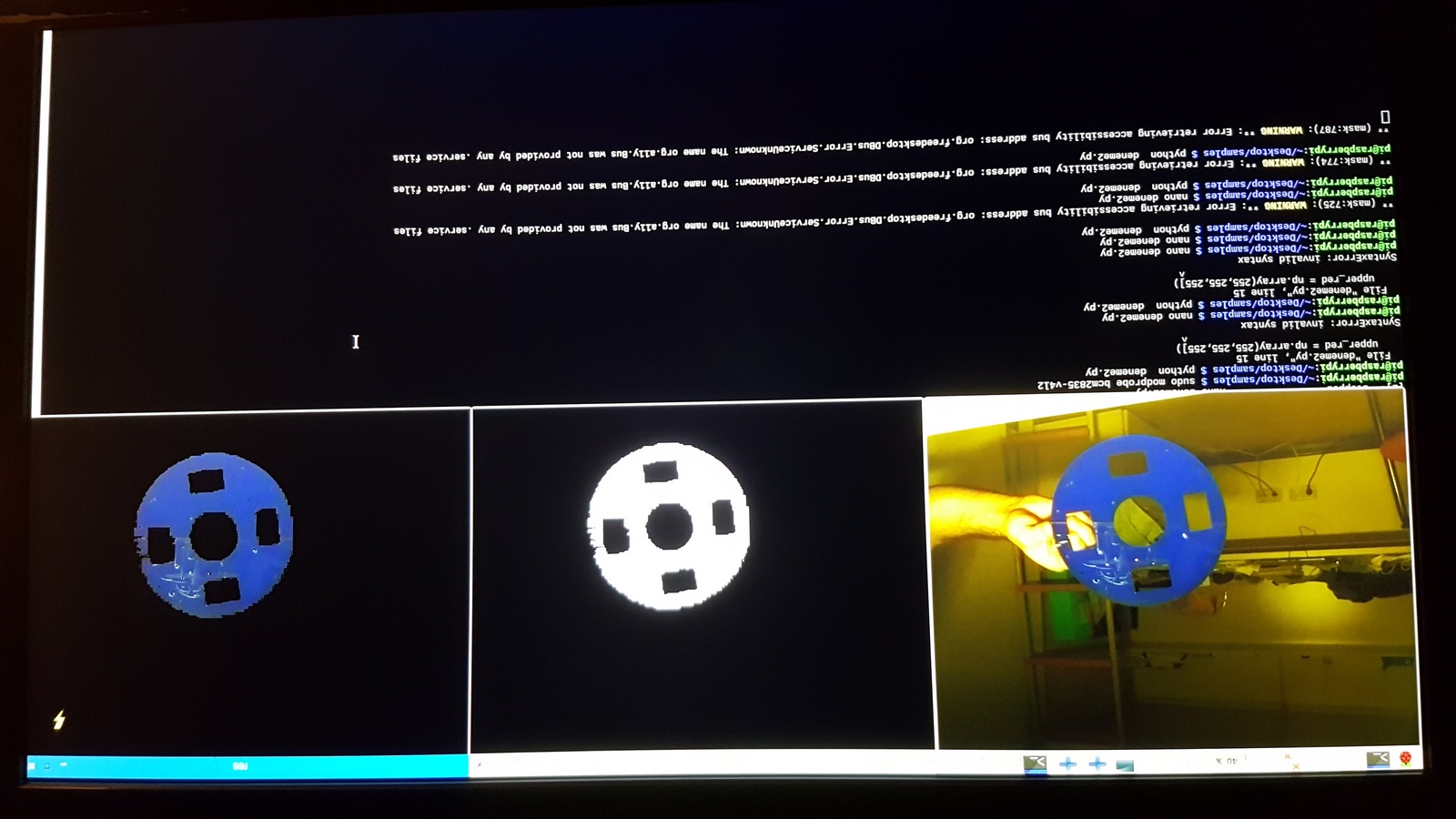
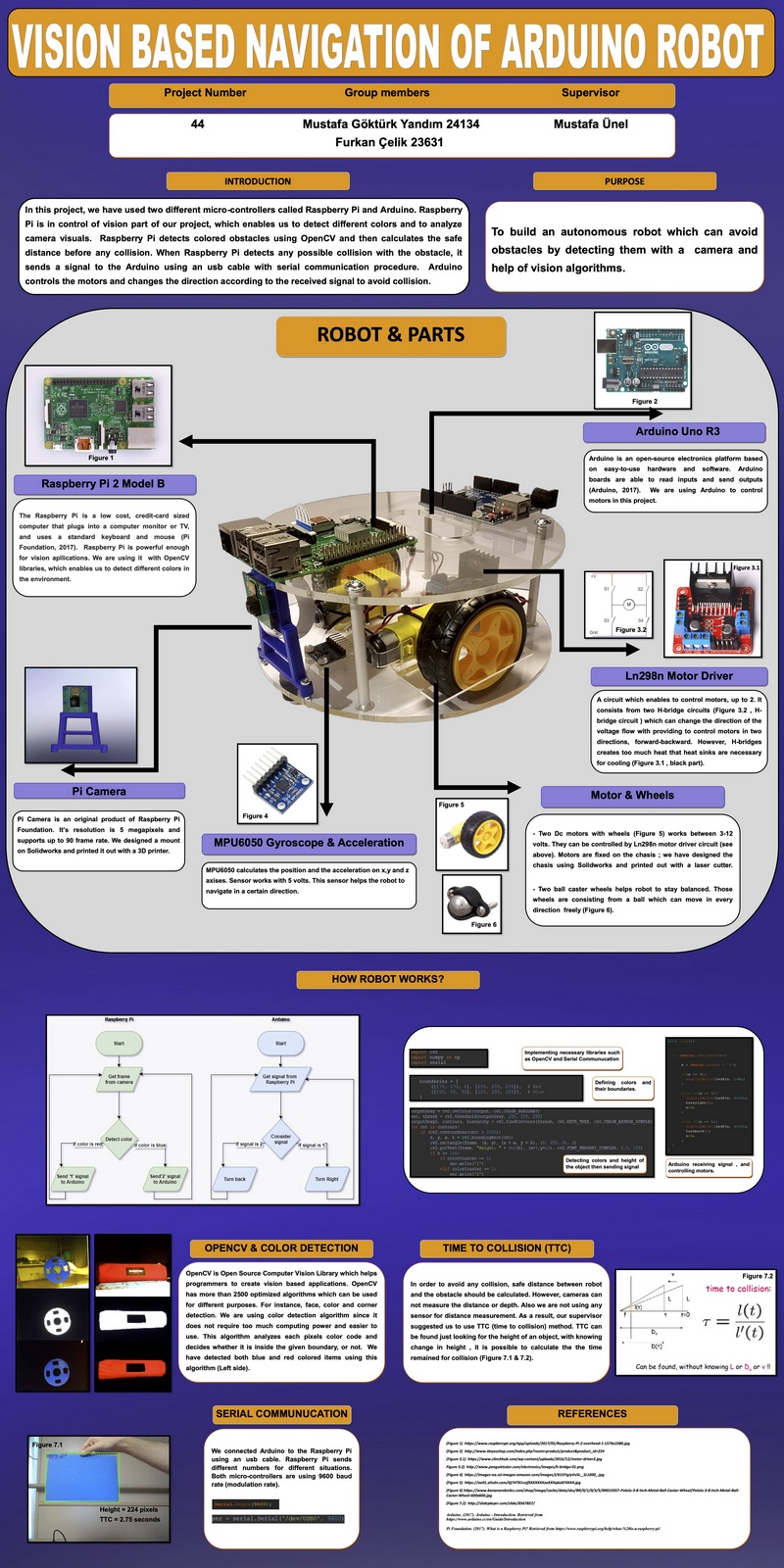
We combined Arduino and Raspberry Pi microcontrollers to create a vision based navigation for our circular robot. I designed this robot using Solidworks and produced the actual version with 3D printing and laser cutting. Then, we added motors and cabling to make it move. We also added a single camera to the front of the robot which is used for the navigation. In that case, we did NOT use any other sensors such as proximity, Lidar, ultrasonic etc., thus we were able to navigate our robot with a single camera and color detection. Raspberry Pi handled the vision part of the project and provided movement info to the arduino which controls the motors thus the actual movement direction.
Below you can find our poster design which was in top 3 best designs among other project groups.